 |
|
|
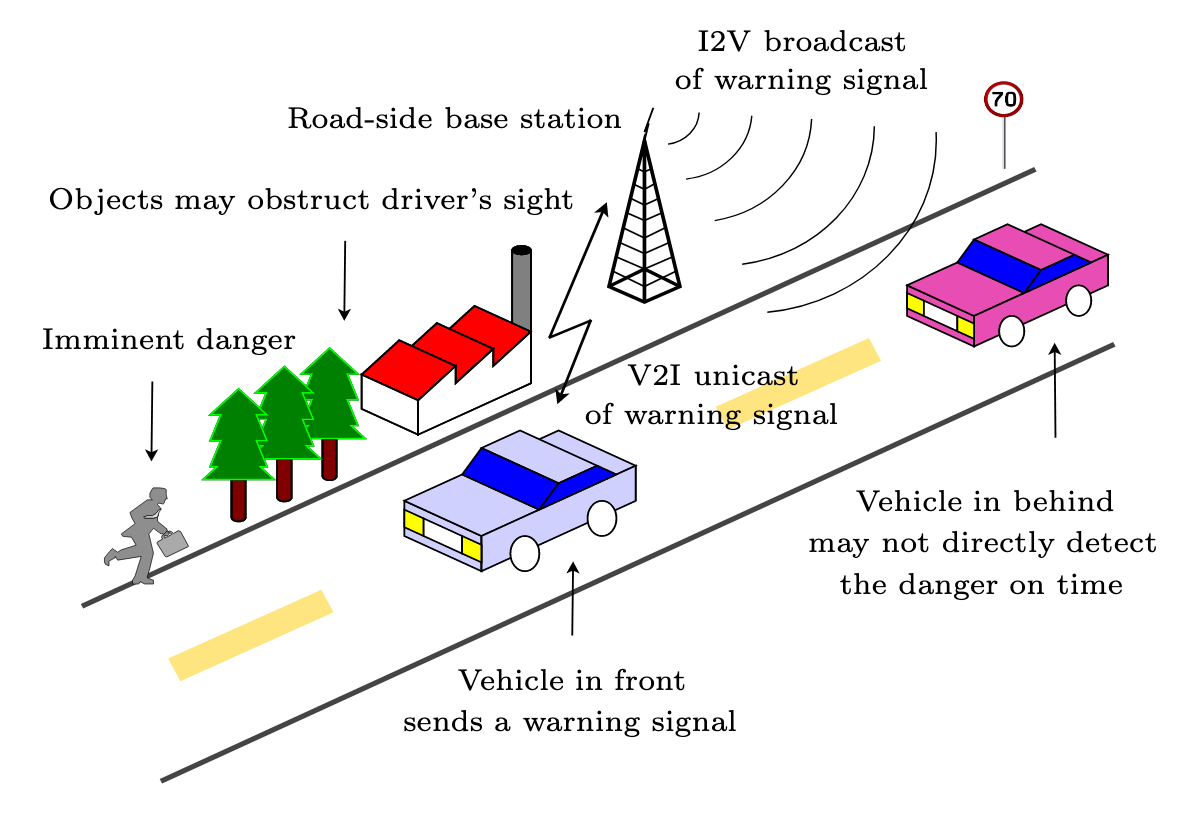
In this figure, the front vehicle detects an imminent road danger, which the following vehicle may not detect in time. AV2I-I2V communication of a warning signal informs the following vehicles about an existing danger. Figure 1 from the paper. |
|
A new paper, "Event-Triggered Add-on Safety for Connected and Automated Vehicles using Roadside Network Infrastructure," proposes a mechanism for a networked vehicular system that can adjust control parameters for timely braking and maintain maneuverability.
The paper, published at arxiv.org, was written by Mohammad Mamduhi and Karl Johansson, Division of Decision and Control Systems, School of Electrical Engineering and Computer Science, Royal Institute of Technology, Stockholm; Ehsan Hashemi, Mechanical and Mechatronics Engineering Department, University of Waterloo, Canada; and John Baras, Institute for Systems Research and Department of Electrical and Computer Engineering, University of Maryland.
Automated driving systems, cooperative vehicles, and advanced driver-assistance systems are becoming increasingly prevalent in vehicles today, and there is a critical need to develop more reliable safety mechanisms within the distributed-system framework for these emerging intelligent transportation systems.
Safety systems have gradually shifted from those designed to stabilize vehicle and wheel dynamics (such as anti-lock brakes), to those that can take control for guidance and respond to emergencies. Emerging “connected vehicles” with partially or conditionally automated driving features (known as Level 3 to Level 4 in vehicle autonomy terms) use several automated driving control systems, such as differential braking, torque vectoring, and active steering. They can benefit from sharing information over network nodes and infrastructure for more proactive and reliable stability control and to enable dramatic fuel efficiency improvements.
Differential braking systems can stabilize vehicles not only by optimally slowing them to expand a safe operating envelope, but also by enhancing yaw tracking performance based on requests from the driver or the automated path planner. Having information about road emergencies can significantly improve the performance of these systems; with this information, corrective longitudinal forces can be applied more quickly and less aggressively. This gives the driver or automated driving system increased maneuverability and better capability to avoid obstacles, make sudden path changes, and reduce speed.
New communication technologies such as 5G provide fast, flexible and application-oriented network services that can be adjusted according to user demands or the criticality of the situation. Features such as network slicing, virtualization, and software-defined networking can enhance the coordination of information in time-sensitive situations. Specifically for safe connected vehicles, communication with roadside network infrastructure, in the form of Vehicle-to-Infrastructure (V2I) and Infrastructure-to-Vehicle (I2V), can lead to significant safety improvements.
Operating on the same physical hardware, “virtual network slices” generally consist of independent sets of software functionalities such as bandwidth, speed, coverage, privacy and connectivity that can be independently implemented and optimized to support service requirements for specific applications.
The paper’s authors proposed an event-based, add-on safety mechanism for vehicles that can enhance controllability in dangerous situations and quickly notify nearby vehicles about the problem. When a vehicle detects a danger, it transmits a warning signal to roadside infrastructure that can in turn be broadcasted to other vehicles that might not yet have detected the danger. When another vehicle receives the signal, its own add-on safety mechanisms would be triggered. Then, this mechanism and the vehicle’s automated driving system would control the vehicle to safely avoid the danger. The communication technology available at the roadside infrastructure would determine the quality of information delivered.
The authors studied two different wireless technologies for communication between the infrastructure and the vehicles, Long-Term Evolution (LTE) and fifth generation (5G). and evaluate their performance in safety augmentation of the vehicles. The proposed scheme was evaluated through extensive numerical analysis using the high-fidelity CarSim software, dedicated for vehicle simulations. Their results confirm the effectiveness of utilizing the event-triggered add-on safety mechanism to reduce longitudinal slip and maintain safe distance between vehicles.
Related Articles:
Game-theoretic planning for autonomous vehicles
Algorithm helps autonomous vehicles navigate common tricky traffic situations
UMD’s SeaDroneSim can generate simulated images and videos to help UAV systems recognize ‘objects of interest’ in the water
ArtIAMAS receives third-year funding of up to $15.1M
Autonomous drones based on bees use AI to work together
New GAMEOPT framework will help future autonomous vehicles safely navigate unsignalized intersections
Physical adversarial examples could deceive an autonomous vehicle's traffic sign recognition system
$1.14M from the State of Maryland will Match Private Donation to Establish Two Brendan Iribe Endowed Professorships in ECE and CS at UMD
Ph.D. student Nilesh Suriyarachchi gives seminar on connected autonomous vehicles for KTH
UMD, UMBC, ARL Announce Cooperative Agreement to Accelerate AI, Autonomy in Complex Environments
November 27, 2019
|
