
![]() Projects
Projects
Developing Autonomy for Unmanned Surface Vehicles by Using Virtual Environments
A major issue in the development of increased autonomy for robotic vehicles such as unmanned surface vehicles (USVs) is the time and expense of developing the software necessary to handle a large variety of missions and all the variations in the encountered environments. We have developed a new approach for developing planning software that operates autonomous USVs. This new approach takes advantage of the significant progress that has been made in virtual environments and machine learning.
 |
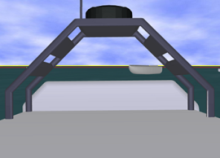 |
Virtual environment for simulation. |
|
Our basic idea is based on having the autonomous USV develop the required planning decision rules and software itself by placing the autonomous USV in a virtual environment and then having it accomplish its mission objective in this environment through trial and error. We have developed a mission planning system for automatically generating a reactive planning logic for USVs. We used our evolutionary framework for automatic generation of planning logic for blocking the advancement of an intruder boat toward a given target. We employed a simulated competitive coevolutionary process to improve the general capability of this blocking logic by pitting the autonomous USV against a set of different, simultaneously evolved enemies.
![]()
Improving Mass Dispensing and Vaccination Clinic Operations
The objective of this research project is to create mathematical and simulation models of mass dispensing and vaccination clinics (also known as points of dispensing or PODs) and to develop decision support tools to help emergency preparedness planners plan clinics that have enough capacity to serve residents quickly while avoiding unnecessary congestion. A poor clinic design will have insufficient capacity and long lines of patients waiting for vaccinations. More patients require more space as they wait to receive treatment. If too many patients are in the clinic, they cause congestion, crowding, and confusion. More ...
![]()
Separating Engineering Design Optimization Problems
Design optimization determines values for design variables such that an objective function is optimized while performance and other constraints are satisfied. The use of design optimization in engineering design continues to increase, driven by more powerful software packages and the formulation of new design optimization problems motivated by the decision-based design framework. We are developing a new optimization approach, which we call separation, that replaces a large design optimization problem with a sequence of subproblems, solves each subproblem once, and produces a feasible solution without iterative cycles. More... [pdf]
![]()
Automated Micro and Nanoscale Assembly Using Optical Tweezers
Optical tweezers can trap, orient, and move a variety of microscale and nanoscale components without physical contact and hence without damaging components due to the deformation caused by contact forces. By utilizing multiple trapping beams, multiple operations can be performed in parallel. This makes optical tweezers a very promising technology for micro and nanoscale assembly. In particular, they can be useful for prototyping electronic devices, manufacturing customized structures for bio-medical application, and repair and rework of structures produced using other processes (e.g., self-assembly). However, in order to use optical tweezers in production processes, the overall operation speed and yield have to be increased considerably. The current project attempts to address these challenges using a three-fold approach:
- Development of 3D imaging system for on-line monitoring of the assembly process. This will ensure that the system is aware of the positions and orientations of all the components in the workspace, thereby decreasing assembly errors. This capability is a prerequisite for autonomous operation.

 Microsphere images generated using optical section microscopy.3D reconstructed image.
Microsphere images generated using optical section microscopy.3D reconstructed image. -
Development of a physically accurate simulator. Such a simulation framework is essential to test any planning and control algorithm, estimate various physical parameters such as trapping potential, and perform statistical validation of the effectiveness of the proposed automated assembly operations.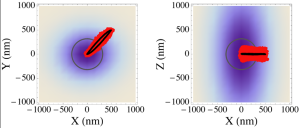
Particle trajectory as it moves towards optical trap center. - Development of planning algorithms for automated operations. The system must be able to perform assembly operations in automated manner. The human operator will have high-level control and manual override capabilities. Under normal operating conditions, the system will automatically generate the traps and transport components.

Automated transport of 2 µm silica sphere in holographic tweezer set-up.
For more details please click here.
![]()