 |
|
|
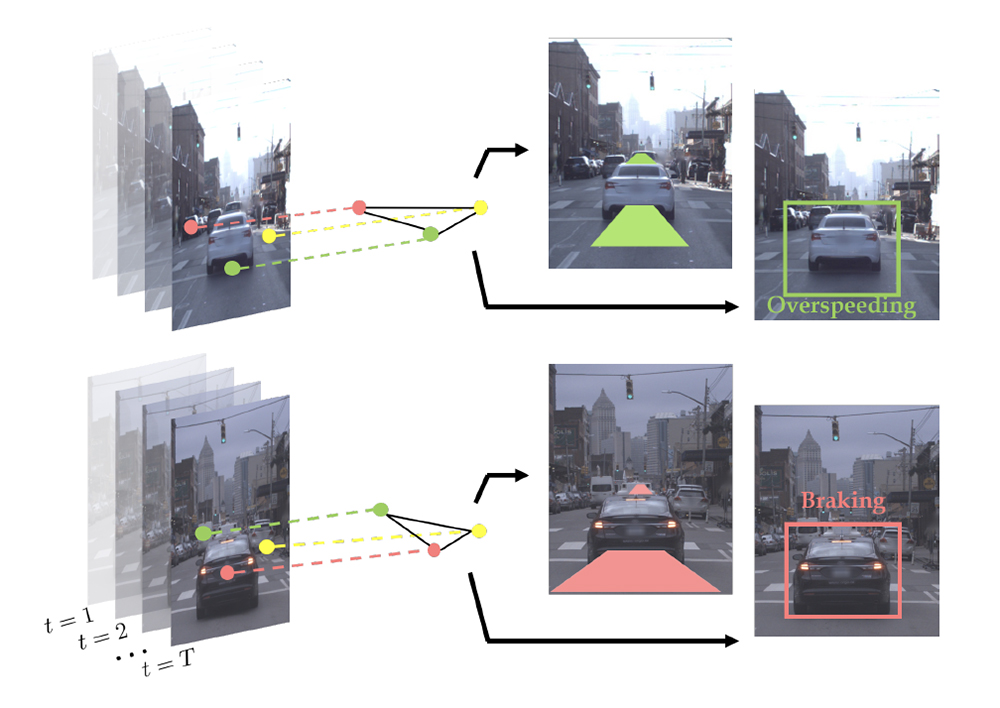
The authors predict the long-term (3-5 seconds) trajectories of road-agents, as well as their behavior (e.g. overspeeding, braking, etc.), in urban traffic scenes. |
|
New work by the Geometric Algorithms for Modeling, Motion and Animation (GAMMA) research team uses a combination of spectral graph analysis and deep learning for traffic forecasting in urban traffic scenarios. The research will be of use to future autonomous vehicles. The team includes Rohan Chandra, Tianrui Guan, Srujan Panuganti, Trisha Mittal, Uttaran Bhattacharya, Aniket Bera, and ISR-affiliated Professor Dinesh Manocha (CS/ECE/UMIACS).
In their paper, Forecasting Trajectory and Behavior of Road agents Using Spectral Clustering in Graph-LSTMs, the researchers predict both low-level information (future trajectories) as well as high-level information (road agent behavior) from the extracted trajectory of each road agent. The formulation represents the proximity between the road agents using a dynamic weighted traffic-graph.
A two-stream graph convolutional LSTM network is used to perform traffic forecasting using these weighted traffic-graphs. The first stream predicts the spatial coordinates of road agents, while the second stream predicts whether a road agent is going to exhibit aggressive, conservative, or normal behavior. The researchers introduce spectral cluster regularization to reduce error margin in long-term prediction (3-5 seconds) and improve the accuracy of predicted trajectories. They evaluated their approach on the Argoverse, Lyft, and Apolloscape datasets and highlighted the benefits over prior trajectory prediction methods.
In practice, the new approach reduces average prediction error by more than 54% over prior algorithms and achieves a weighted average accuracy of 91.2% for behavior prediction.
The method has some limitations. Only one feature was used to design the behavior prediction model, which may not be able to generalize to new traffic scenarios. In addition, training is slow and takes several hours due to the number of computations required for computing the traffic graphs and corresponding Laplacian matrices. As the research progresses, behavior prediction will become data-driven, rather than rule-based. In addition, implementation will be optimized using GPU parallelization to improve the runtime.
Related Articles:
RoadTrack algorithm could help autonomous vehicles navigate dense traffic scenarios
Who's walking deceptively? Manocha's team thinks they know.
Algorithm helps autonomous vehicles navigate common tricky traffic situations
Shneiderman: Faulty machine learning algorithms risk safety, threaten bias
Game-theoretic planning for autonomous vehicles
New GAMEOPT framework will help future autonomous vehicles safely navigate unsignalized intersections
New book by Ben Shneiderman focuses on Human-Centered AI opportunities
Physical adversarial examples could deceive an autonomous vehicle's traffic sign recognition system
Ph.D. student Trisha Mittal named 2022 Adobe Research Fellow
EVPropNet finds drones by detecting their propellers
December 9, 2019
|
