 |
|
|
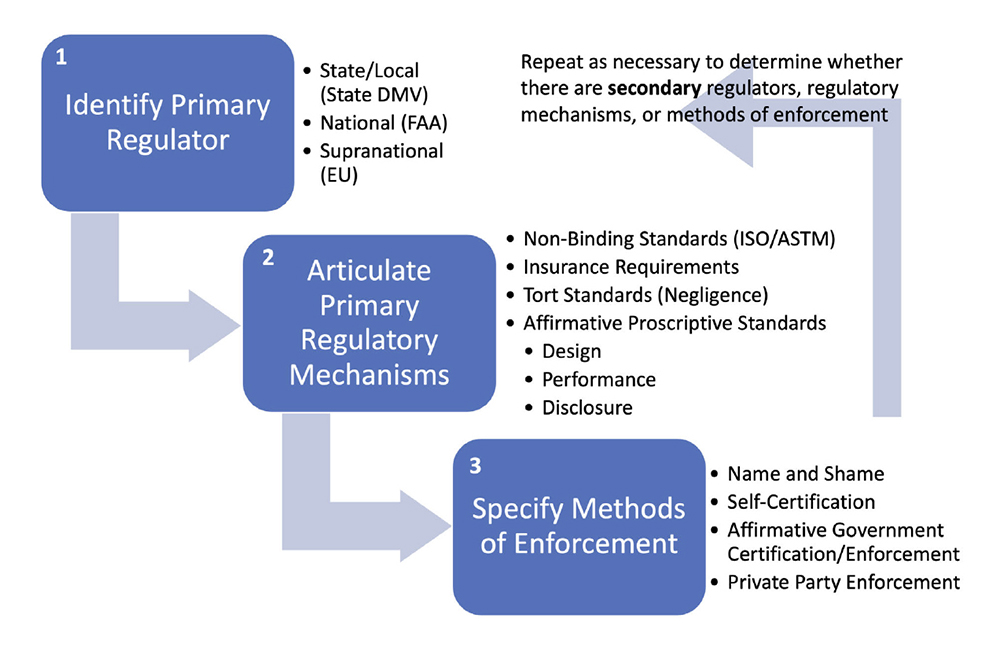
Fig. 1 from the paper. A framework to categorize key aspects of regulatory systems. (Click for larger view) |
|
Autonomous systems hold promise for signi?cant improvements in ?elds from aircraft to cars to medical devices. These systems will be subject to legal governance requirements. While some regulatory principles apply in general to autonomous systems, an ‘‘autonomy-focused’’ approach is an inadequate lens to consider their governance. A better approach takes into consideration that autonomous systems are improvements of currently regulated complex systems, and that the regulation of autonomous elements will occur within those systems’ preexisting regulatory frameworks. The nature of future autonomous regulation will likely depend on the preexisting features of that substantive system, rather than on an optimal autonomy-focused approach divorced from history. In the social sciences, this is known as “path dependency.”
Assistant Professor Huan Mumu Xu (AE/ISR) and attorney Joseph Borson have developed a framework of regulatory approaches for autonomous systems in “A Path Dependent Approach for Characterizing the Legal Governance of Autonomous Systems.” Their paper was recently published online by IEEE Access.
The work characterizes diverse regulated systems with an eye toward assessing future autonomous developments through a framework of regulatory approaches that identify speci?c features of the preexisting regulatory scheme for a given system. They examine three different regulatory regimes (aviation, motor vehicles, and medical devices) across two continents, and consider how the same type of requirement—for example, fail-safe systems—can lead to different types of regulations depending on the baseline framework.
Related Articles:
Baras, Sadler part of large ARL DataDrivER project
“Gambit” Pays Off in UMD Team’s Search-and-Rescue Competition Win
New algorithms for multi-robot systems in low communication situations
ArtIAMAS receives third-year funding of up to $15.1M
UMD Team Wins Inaugural NIST UAS 3.1: FastFind Challenge
Helping robots navigate to a target, around obstacles and without a map
USMSM Debuts SMART Innovation Center
Derek Paley's e-scooter work featured in Washington Post
'MorphEyes' stereo camera system improves quadrotor UAV navigation
Paley receives ONR funding for cross-domain cooperative control
January 5, 2023
|
