|
 |
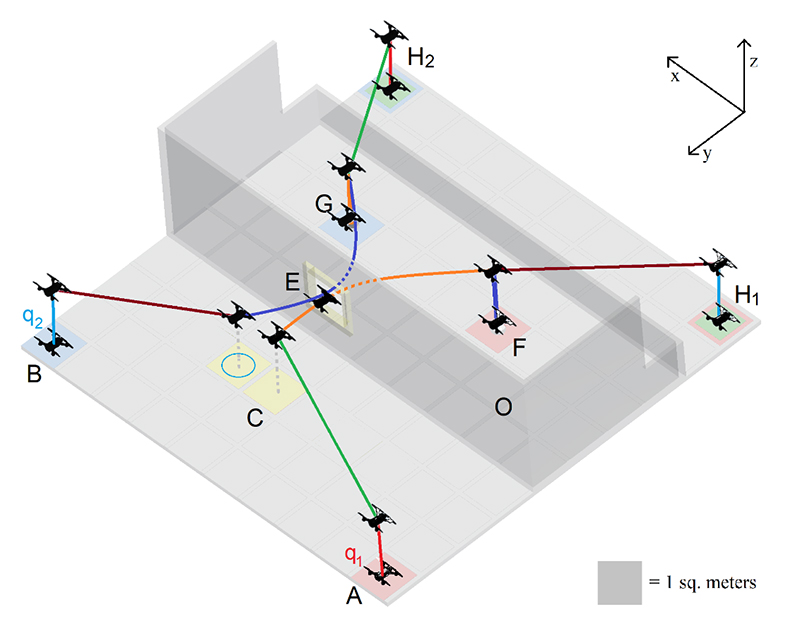
Fig. 4 from the paper: composed trajectories for sub-tasks operating simultaneously. |
|
Inexpensive, agile quadrotor unmanned aerial vehicles (UAVs) are being used widely as testbeds in key areas of research such as surveillance, search and rescue, and aerial grasping. The enormous potential of quadrotors working together in autonomous search and rescue is evident during natural disasters, where it is impossible for humans and terrestrial robots to access highly cluttered spaces to rescue people from life threatening situations. UAVs can either locate and grab a target themselves or serve as a guide for other robots and humans to help evacuate a target.
Obviously, UAVs need to be able to perform these critical tasks safely within a short period of time. Although some recent research ensures finite time and safe mission completion for multi-agent systems, they are computationally complex and cannot be implemented in real-time. In addition they use simple dynamical models for the robots, which limit their maneuverability in practice.
In Fast, Composable Rescue Mission Planning for UAVs using Metric Temporal Logic, Ph.D. student Usman Fiaz and his advisor Professor John Baras (ECE/ISR) propose a hybrid compositional approach to time-critical search and rescue planning for quadrotor UAVs. They use Metric Temporal Logic (MTL) task specifications, and present an optimization-based method implementable in real-time. Using a simple yet realistic test case, they demonstrate the computational efficiency of their approach, and show that by breaking down the mission into several sub-tasks and using a hybrid model for the system, it is possible to solve the challenging problem of motion planning for multi-agent systems with rich dynamics and finite time constraints in real time.
Starting with a known environment, the authors specify the mission using MTL and use a hybrid dynamical model to capture the various modes of UAV operation. They then divide the mission into sub-tasks by exploiting the invariant nature of safety and timing constraints along the way, and the different modes (i.e., dynamics) of the UAV.
For each sub-task, the researchers translate MTL specifications into linear constraints and solve the associated optimal control problem for desired path, using a Mixed Integer Linear Program (MILP) solver. The complete path for the mission is constructed recursively by composing individual optimal sub-paths.
Through simulations, the authors show that the resulting suboptimal trajectories satisfy the mission specifications, and the proposed approach leads to significant reduction in the computational complexity of the problem, making it possible to implement in real-time.
The proposed method ensures the safety of UAVs at all times and guarantees finite time mission completion. The approach is scalable for a large number of UAVs.
Related Articles:
Fatemeh Alimardani receives WTS-DC scholarship
'MorphEyes' stereo camera system improves quadrotor UAV navigation
New hazard mitigation software moves UAVs closer to National Airspace System integration
Aerodynamic interaction model improves quadrotor flight stability in gusty winds
Workshop focuses on needs of autonomous agent networks
Clark School researchers test decentralized task allocation algorithms for UAV teams
Ph.D. student Usman Fiaz competes in Unix 50 challenge at Nokia Bell Labs
Alum Serban Sabau joins Stevens Institute as assistant professor
Workshop honors alum Naomi Leonard
Oct. 13-14: Workshop on New Frontiers in Networked Dynamical Systems: Assured Learning, Communication & Control
January 10, 2020
|
