|
 |
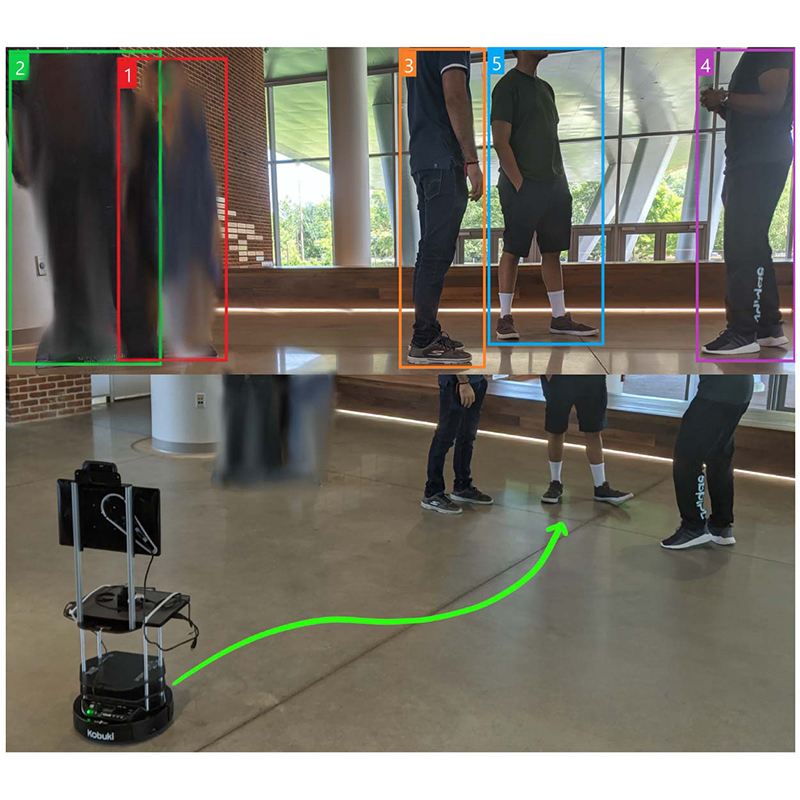
Fig. 1 from the paper: Robot detecting social distancing breaches. The robot detects non-compliance to social distancing norms, classifying non-compliant pedestrians into groups and autonomously navigating to the static group with the most people in it (a group with 3 people in this scenario). The robot encourages the non-compliant pedestrians to move apart and maintain at least 2 meters of social distance by displaying a message on the mounted screen. |
|
Four former Master of Engineering in Robotics students and their advisor have published research on a social distancing surveillance robot in the Dec. 1, 2021 open access journal PLOS One.
COVID surveillance robot: Monitoring social distancing constraints in indoor scenarios was written by current computer science Ph.D. students Adarsh Jagan Sathyamoorthy and Utsav Patel (both 2019 M.Eng Robotics); alumni Moumita Paul and Yash Savle (both 2021 M.Eng Robotics); and their advisor, ISR-affiliated Distinguished University Professor Dinesh Manocha (ECE/CS). The work was completed in the Geometric Algortithms for Modeling, Motion and Animation Lab.
The researchers developed a method to automatically detect pairs of humans in a crowded scenario and determine whether they are within about two meters of space of each other using an autonomous mobile robot equipped with closed-circuit television (CCTV) cameras. The robot also was outfitted with additional sensors—an RGB-D (Red Green Blue—Depth) camera and a 2-D lidar. These sensors allowed the robot to both detect “social distancing breaches” and navigate itself towards the location. A display mounted on the robot then discreetly shows text asking the people to move further apart from each other. If they do not comply, the robot has the ability to pursue them while avoiding collisions with stationary objects or people moving in a crowd.
In addition, the researchers demonstrated that the robot can be fitted with a thermal camera that can measure the presence of elevated temperature, indicative of a fever. The robot is able to transmit these images to security or health personnel. The robotic platform can be integrated with a static wall-mounted CCTV camera to improve the number of social distancing breaches detected.
For more information
Read the PLOS press release about this paper.
Read a previous story about this research from Summer 2021.
Read about a best paper award this research won in Spring 2021.
A video of the robot in action is available here.
Related Articles:
Helping robots navigate to a target, around obstacles and without a map
MRC Faculty and Researchers to Present 16 Papers at International Robotics Conference - IROS 2020
Cornelia Fermüller is PI for 'NeuroPacNet,' a $1.75M NSF funding award
Alum Fumin Zhang elected to IEEE Fellow
Miao Yu receives NSF funding to develop ice-measuring sensors
ECE and ISR alumni feature prominently at American Control Conference
New book by Jeffrey Herrmann: Metareasoning for Robots
The Falcon and the Flock
Aloimonos, Sandini contribute chapter to MIT Press book, Cognitive Robotics
The Modern Battle for Maryland’s Oysters
December 8, 2021
|
