 |
|
|
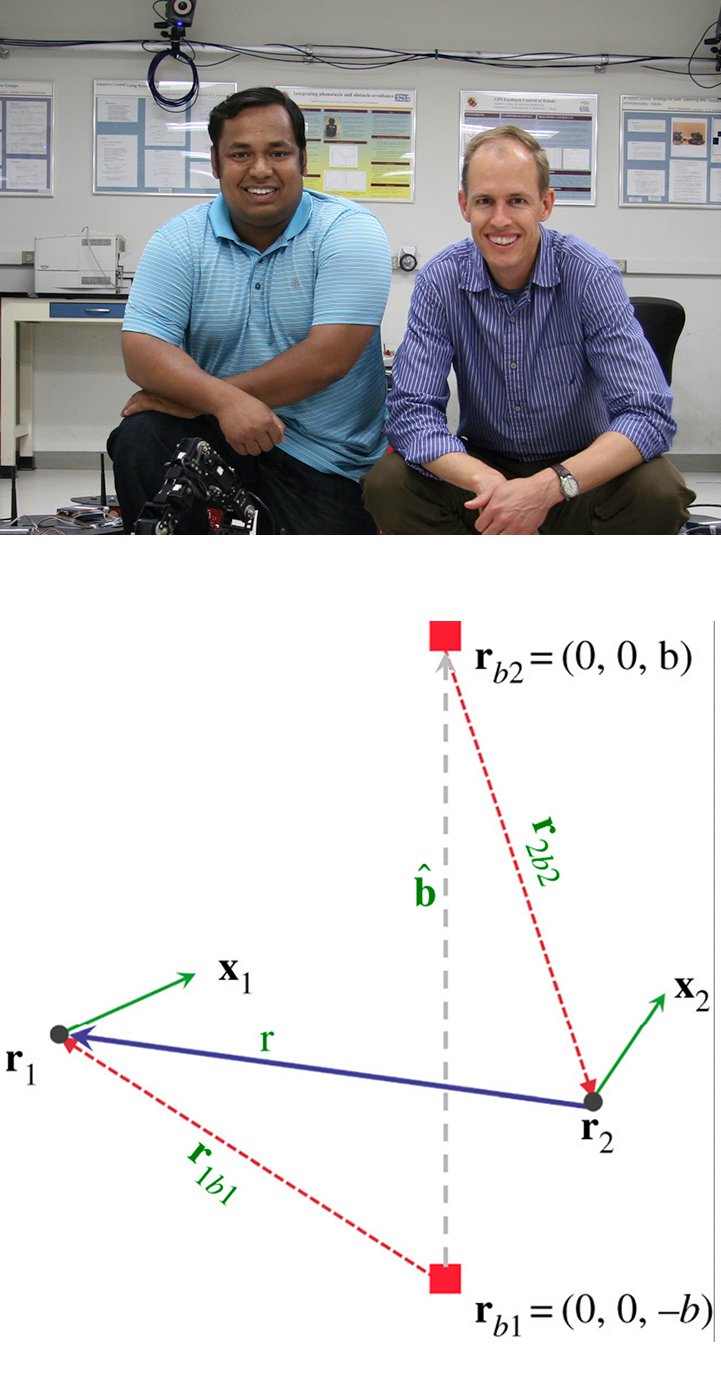
Above: Biswadip Dey and Kevin Galloway in the Intelligent Servosystems Laboratory. Below: Two mobile agents r1 and r2 maneuvering in the vicinity of fixed beacons rb1 and rb2. (Fig. 1 from the paper.) |
|
Two ISR/ECE alumni have collaborated on a paper newly published in Proceedings of the Royal Society A. Kevin Galloway (EE Ph.D. 2011) and Biswadip Dey (EE Ph.D. 2015) co-wrote the paper, "Beacon-referenced pursuit for collective motion in three dimensions," published on Feb. 12, 2020. They introduce a decentralized control mechanism to guide steering control of autonomous agents maneuvering among multiple moving and stationary entities in a three-dimensional environment.
Galloway is an associate professor at the United States Naval Academy, where he is on the faculty of the Department of Electrical and Computer Engineering. Dey is a research scientist at Siemens in Princeton, N.J. Both alumni were advised by Professor P. S. Krishnaprasad (ECE/ISR) and conducted research in the Intelligent Servosystems Laboratory.
Their control law is a modification of the three-dimensional constant bearing (CB) pursuit law that provides a way to allocate simultaneous attention to multiple entities. Galloway and Dey investigate the behavior of the closed-loop dynamics for a system with one agent referencing two beacons, as well as a two-agent mutual pursuit system wherein each agent employs the beacon-referenced CB pursuit law with regards to the other agent and a stationary beacon. They demonstrate that under certain assumptions on the associated control parameters this problem admits circling equilibria with agents moving on circular orbits with a common radius, in planes perpendicular to a common axis passing through the beacons. As the common radius and distances from the beacon are determined by the choice of parameters in the pursuit law, their approach provides a means to engineer desired formations in a three-dimensional setting.
Related Articles:
Workshop honors alum Naomi Leonard
Alum Naomi Leonard is 2023 IEEE Control Systems Award recipient
Alumnus Kevin Galloway earns tenure at the U.S. Naval Academy
Alum Fumin Zhang elected to IEEE Fellow
ECE and ISR alumni feature prominently at American Control Conference
Alum Sean Andersson named Mechanical Engineering Department chair at Boston University
The Falcon and the Flock
Alumnus Udit Halder’s work published as cover article in Proceedings of The Royal Society A
New algorithms for multi-robot systems in low communication situations
Alum Nitin Sanket wins Larry S. Davis Doctoral Dissertation Award
May 6, 2020
|
